ROS常用可视化工具的使用
|
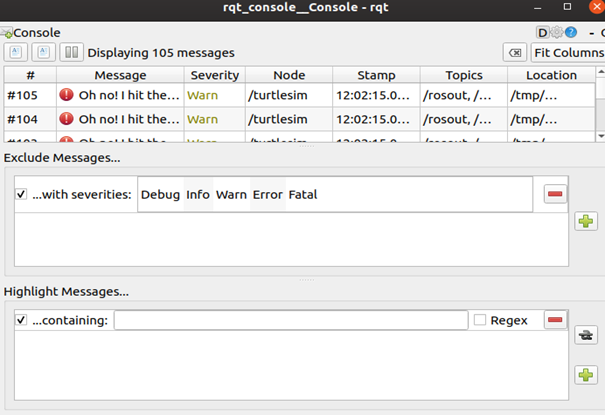
日志输出工具——rqt_console
|
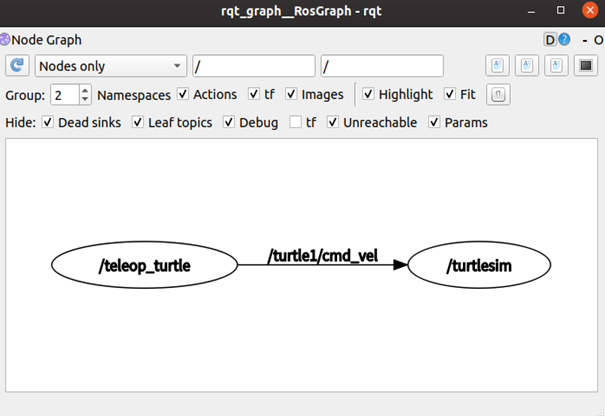
计算图可视化工具——rqt_graph
|
|
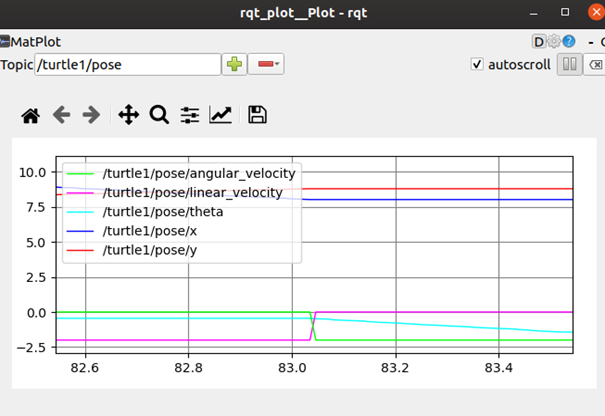
数据绘图工具——rqt_plot
|
图像渲染工具——rqt_image_view
|
查看ros提供rqt工具
yys@yys:~$ rqt_
rqt_bag rqt_dep rqt_image_view rqt_plot
rqt_console rqt_graph rqt_logger_level rqt_shell
|
|
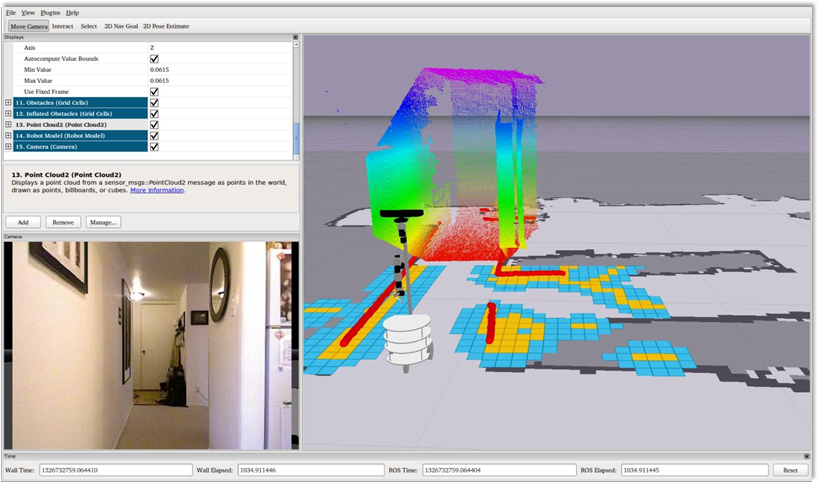
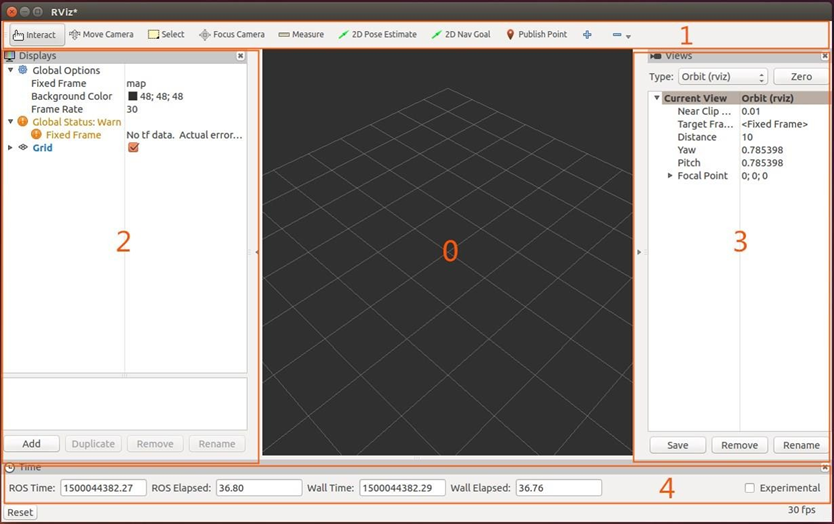
机器人开发过程中的数据可视化界面 |
|
0 :3D视图区 1 :工具栏 2 :显示项列表 3 :视角设置区 4 :时间显示区 |
|
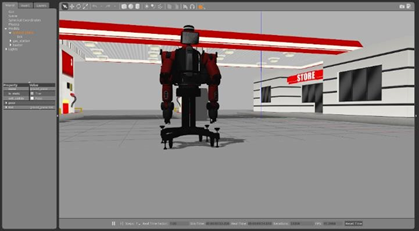
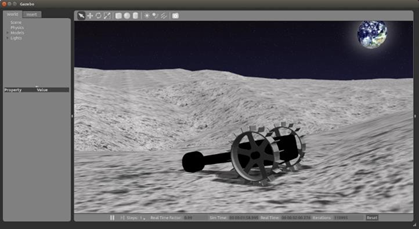
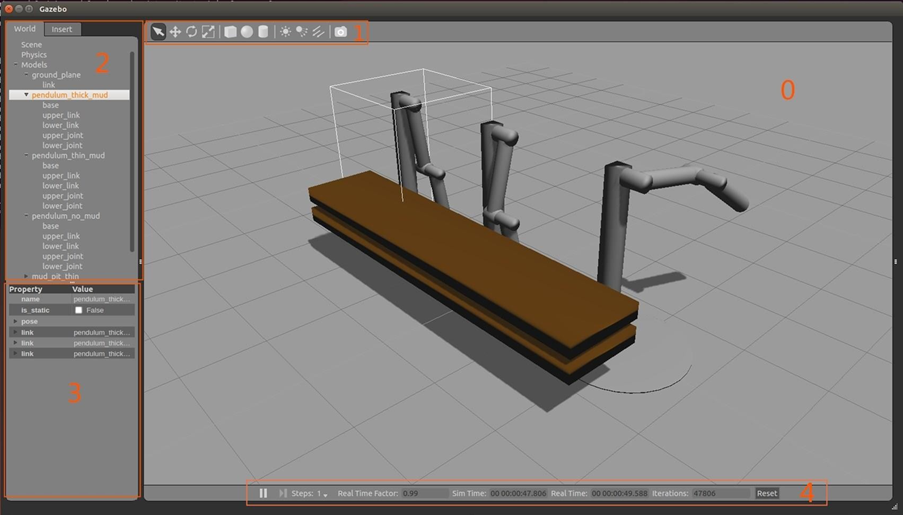
Gazebo是一款功能强大的三维物理仿真平台
- 具备强大的物理引擎
- 方便的编程与图形接口
- 开源免费
- 高质量的图形渲染
其典型应用场景包括
- 测试机器人算法
- 机器人的设计
- 现实情景下的回溯测试
 |
 |
 |
 |
|
0 :3D视图区 1 :工具栏 2 :模型列表 3 :模型属性项 4 :时间显示区 |
|
报错
在虚拟机下运行gazebo,关于vmw_ioctl_command error Invalid argument错误
“VMware: vmw_ioctl_command error Invalid argument.
Aborted (core dumped)
/opt/ros/indigo/lib/gazebo_ros/gazebo: 39: kill: invalid signal number or name: SIGINT”
在终端下设置环境变量为0
export SVGA_VGPU10=0
在运行
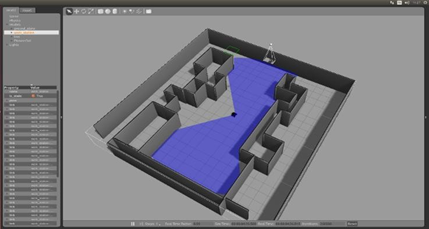
roslaunch gazebo_ros willowgarage_world.launch
解决
本文作者: 永生
本文链接: https://www.yys.zone/detail/?id=116
版权声明: 本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明出处!
评论列表 (0 条评论)